Runtime ROS Parameters
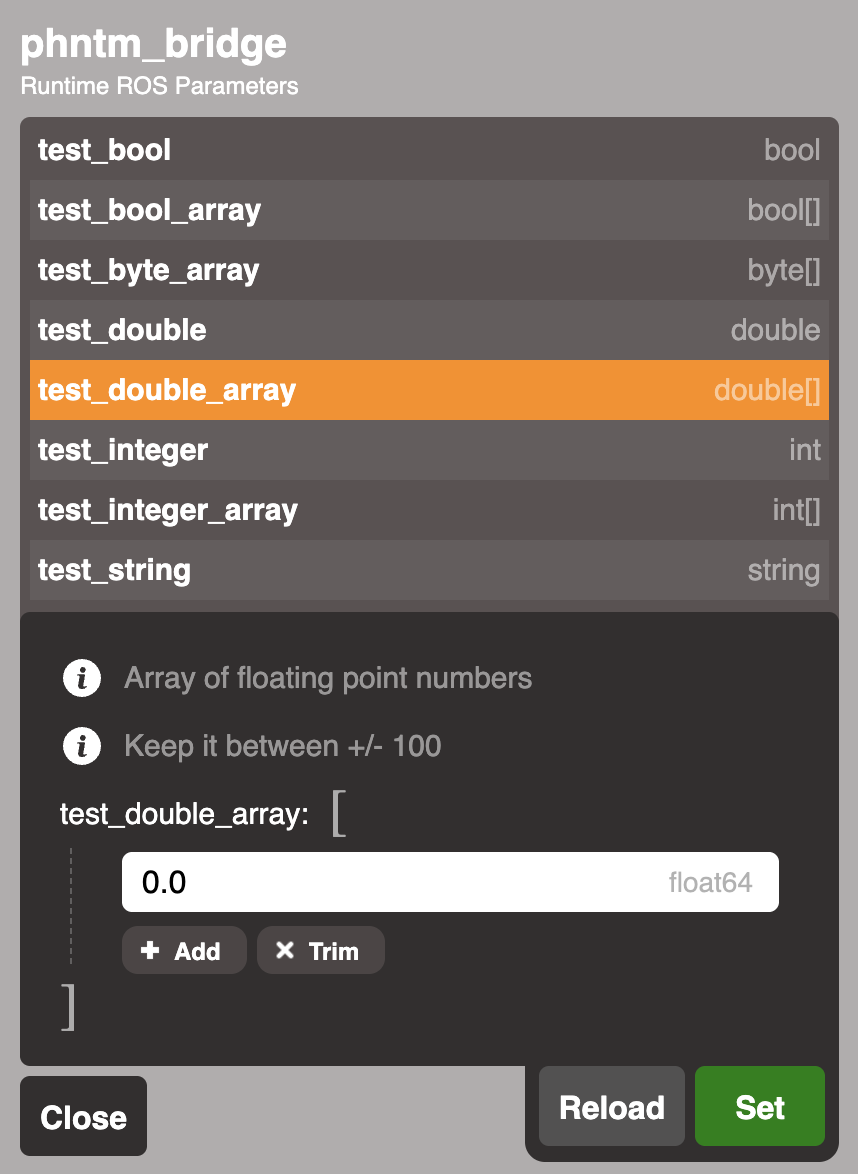
In the Graph View, the icon next to every ROS node name opens the Parameter Inspector, as shown here.
This dialog allows to inspect and modify any ROS parameters declared by the node. Parameters marked as read_only can not be edited. Input is validated according to parameter’s type, description and additional_constraints are displayed as text hints.
The ROS node needs to provide services of type rcl_interfaces/srv/ListParameters, rcl_interfaces/srv/DescribeParameters, rcl_interfaces/srv/GetParameters and rcl_interfaces/srv/SetParameters for this functionality to work. This is best achieved by instantiating the node class with start_parameter_services=True. You also need to spin the node to process these service requests.
You can adjust permissions for parameter services with the following configuration:
/**:
ros__parameters:
blacklist_parameter_services:
- controller_manager # nodes with disabled parameter services
enable_node_parameters_read: True
enable_node_parameters_write: False # only reading allowed